Última actualización: octubre 21, 2022
2.2.4.2 Práctica de laboratorio: sensor flexible y servo (versión del instructor)
Nota para el instructor: El color de fuente rojo o las partes resaltadas en gris indican texto que aparece en la copia del instructor solamente.
Topología
Objetivos
- Conecte los circuitos entre la placa de prueba y RedBoard
- Cargue y ejecute el esquema en el IDE de Arduino
Aspectos básicos/situación
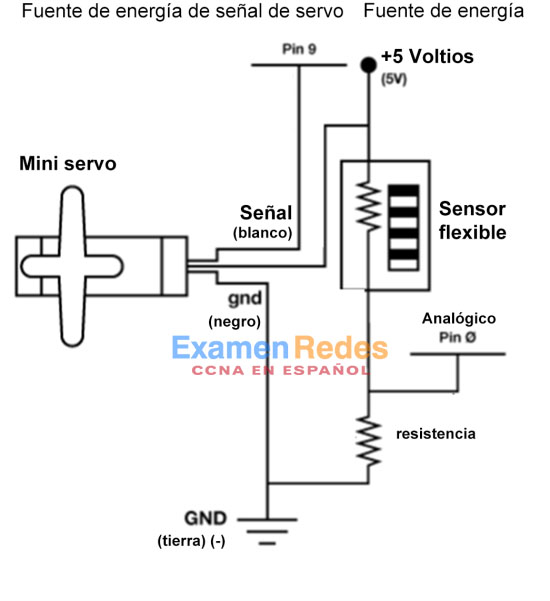
Esta práctica de laboratorio utilizará un sensor flexible especial para cambiar la resistencia en función del codo del sensor. La resistencia variante se utilizará para controlar el voltaje enviado al servomotor que causará los cambios de posición.
Recursos necesarios
- Kit para inventores de SparkFun (SIK) o componentes equivalentes
- PC configurada con los controladores de Arduino y el software de Arduino
- Archivos de muestra de códigos de la guía del SIK de SparkFun
Paso 1: Conecte los circuitos entre la placa de prueba y RedBoard.
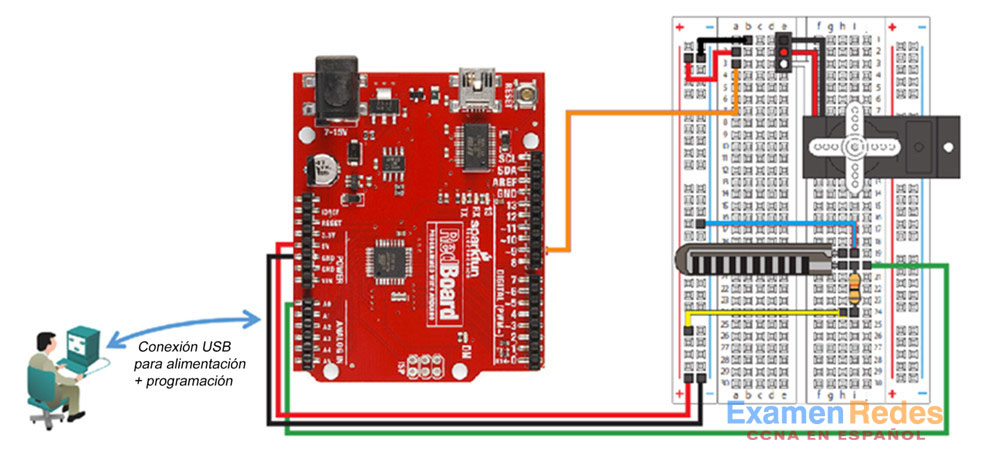
Consulte el diagrama de la topología para obtener una referencia visual de los siguientes pasos.
a. Seleccione 1 resistor de 10 000 Ohm (Ω), 3 cables negros, 3 cables rojos, 1 cable naranja, 1 cable verde, 1 cable azul, 1 cable amarillo, 1, 1 cable blanco, 1 servomotor y un sensor flexible del SIK.
b. Inserte el resistor de 10 000 Ohm (Ω) y conecte los cables a i20 y i24.
c. Inserte el sensor flexible en h19 y h20.
d. Conecte el servomotor con los cables negro, rojo y blanco de manera que coincidan con los colores provenientes del servomotor. El cable negro se conecta a e1, el rojo a e2 y el blanco a e3.
e. Conecte el cable negro de b1 a la barra (-) más cercana a la fila a.
f. Conecte el cable rojo de a2 a la barra (+) más cercana a la fila a.
g. Conecte el cable azul de i19 a la barra (-) más cercana a la fila a.
h. Conecte el cable amarillo de h24 a la barra (+) más cercana a la fila a.
i. Conecte el cable naranja de a3 al pin 9 en RedBoard.
j. Conecte el cable verde de j20 al pin A0 en RedBoard.
k. Conecte el cable negro (-) de la placa de prueba a GND en RedBoard.
l. Conecte el cable rojo (+) de la placa de prueba al pin de 5 V en RedBoard.
Paso 2: Cargue y ejecute el esquema en el IDE de Arduino.
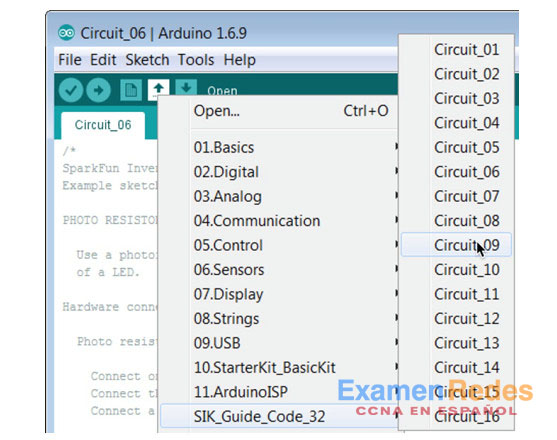
a. Haga clic en la flecha ascendente para ver la carpeta de ejemplos. Seleccione Circuit_09 de la carpeta SIK_Guide_Code_32.
Nota: la carpeta SIK_Guide_Code_32 solo existe si el código se descarga de http://sparkfun.com/sikcode y copia en la carpeta de ejemplos ubicada en los archivos del programa Arduino, generalmente C:\Program Files\Arduino\examples.
b. Verifique y compile el esquema para crear un firmware ejecutable que pueda cargarse en la memoria flash del microcontrolador.

c. Asegúrese de que RedBoard esté conectado a la PC con el cable USB. Cargue el firmware en RedBoard.
d. Curve el sensor flexible. El servomotor debe girar en sentido horario según la curvatura del sensor. Cuando se suelta la flexión del sensor, el servomotor debe volver a la posición de inicio.
Reflexión
¿Qué otro componente incluido en el SIK puede funcionar mejor que el sensor flexible para controlar el servomotor?
Las respuestas pueden variar, pero el potenciómetro sería una buena elección. El fotorresistor también puede ser una buena opción según la tarea.