Última actualización: octubre 20, 2022
2.2.1.4 Packet Tracer: simulación de dispositivos de IoT (Versión para instructor)
Nota para el instructor: El color de fuente rojo o las partes resaltadas en gris indican texto que aparece en la copia del instructor solamente.
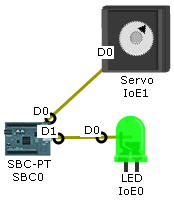
Topología
Objetivos
Parte 1: arme el circuito
- Coloque los componentes en el espacio de trabajo lógico
- Conecte los componentes
Parte 2: programe una computadora de una placa (SBC)
- Ejecute el programa predeterminado
- Modifique el programa predeterminado
Aspectos básicos/situación
Packet Tracer ha evolucionado para simular dispositivos de IoT. Este tutorial lo guiará por el proceso de colocar componentes en el espacio de trabajo lógico, conectar los componentes y programar la computadora de una placa (SBC) para controlarlos.
Recursos necesarios
- PC con Packet Tracer 7.0 o posterior instalado
Parte 1: Desarrollo del circuito
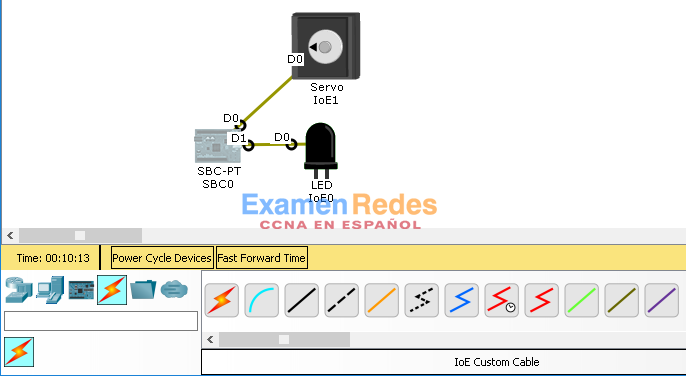
Paso 1: Coloque los componentes en el espacio de trabajo lógico.
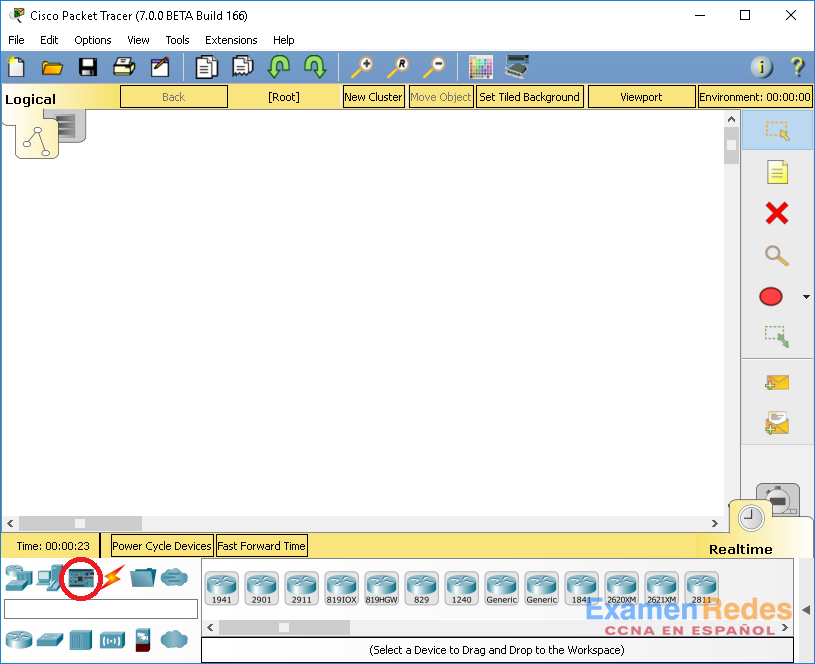
a. Abra Packet Tracer 7.0 o posterior y elija el icono Componentes.
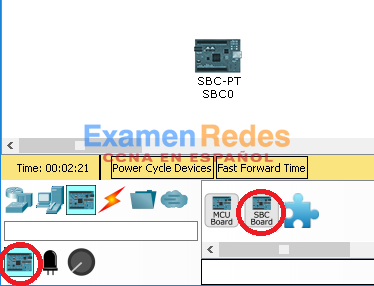
b. Coloque la Placa de la SBC en el Espacio de trabajo lógico.
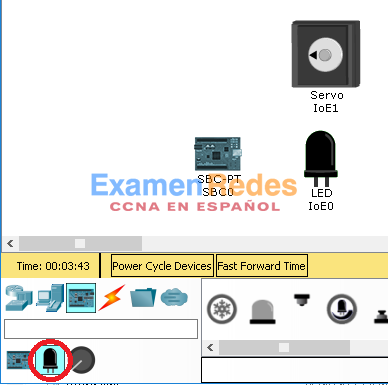
c. Coloque un LED y un Servomotor en el Espacio de trabajo lógico.
Paso 2: Conecte los componentes.
a. Haga clic en el icono Conexiones y seleccione un Cable personalizado de IoT; conecte SBC0 D0 con Servo0 D0.
b. Seleccione otro Cable personalizado de IoT y conecte SBC0 D1 con LED D0.
Parte 2: Programe una computadora de una placa (SBC)
Paso 1: Ejecute el programa predeterminado.
a. Haga doble clic en SBC0 y seleccione la ficha Programación.
b. Haga doble clic en Parpadeo (Python) en el panel izquierdo para abrirlo.
c. Haga doble clic en main.py para revelar el modo Python predeterminado.
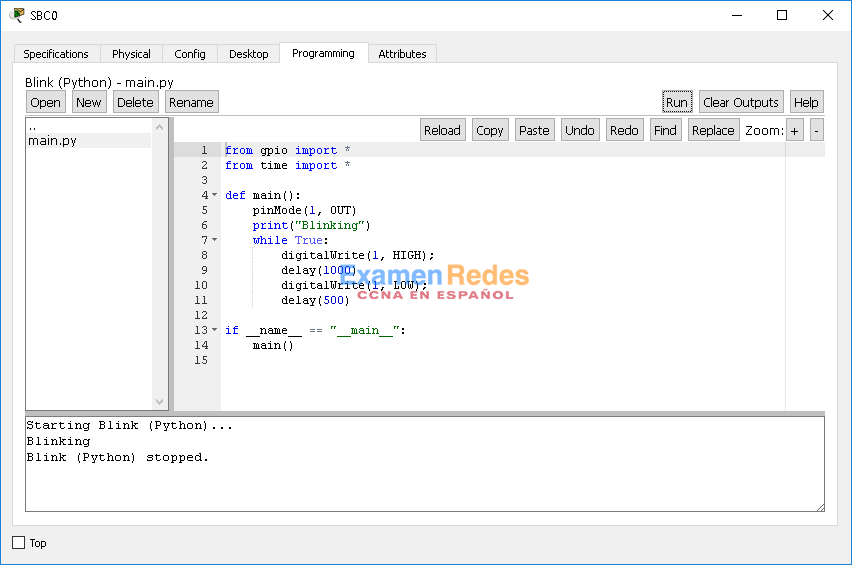
d. Haga clic en el botón Ejecutar para ejecutar el código predeterminado. Regrese al espacio de trabajo lógico. El LED debería parpadear.
e. Regrese a la ficha Programación de SBC0 y haga clic en el botón Detener para detener la ejecución del programa.
Paso 2: Modifique el programa predeterminado.
a. Copie la línea 8 del código fuente y péguela debajo. Repita con la línea 11 (anteriormente la línea 10).
b. Modifique las líneas nuevas del código para que se lea:
customWrite(0, 127); y customWrite(0, -127);
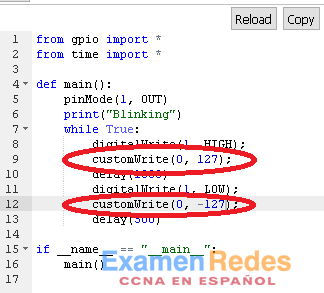
c. ejecute el programa modificado. El servomotor ahora debería moverse junto con el LED parpadeante.
Reflexión
¿Qué puede modificarse para que el servomotor active las direcciones opuestas mientras el LED parpadea?
Reemplace el 127 del programa por -127.