Última actualización: octubre 20, 2022
2.3.1.2 Packet Tracer: sensores y microcontrolador de PT (versión para el instructor)
Nota para el instructor: el color de fuente rojo o las partes resaltadas en gris indican texto que aparece en la copia del instructor solamente.
Topología
Objetivos
Parte 1: Familiarícese con los sensores en Packet Tracer (PT 7.1)
Parte 2: familiarícese con el microcontrolador de PT (PT-MCU) en PT 7.1
Parte 3: Familiarícese con la programación del microcontrolador de PT (PT-MCU) en PT 7.1
Aspectos básicos/situación
Una unidad de microcontrolador (MCU) es una pequeña computadora incorporada a un sistema en un chip (SoC). Contiene un núcleo de procesador, una memoria y unidades periféricas programables de entrada/salida. Los microcontroladores están diseñados para las aplicaciones incorporadas o las aplicaciones que requieren pocos recursos de computadora. Por otro lado, los microprocesadores utilizados en las computadoras personales por lo general se usan para admitir otras aplicaciones genéricas que requieren más recursos informáticos.
Ejemplos de aplicaciones que dependen de microcontroladores, como sistemas de control de motores automotrices, dispositivos médicos, controles remotos, máquinas de oficinas, electrodomésticos, herramientas eléctricas, juegos y otros sistemas integrados. Microcontroladores de señales combinadas, como componentes analógicos integrados necesarios para controlar los sistemas electrónicos no digitales.
Packet Tracer 7.1 brinda soporte para un emulador de MCU. El usuario puede programar la MCU de PT para que realice tareas similares a las MCU del mundo real. Para simplificar el proceso, la MCU de PT puede programarse con Java y Python.
En esta actividad, lanzará MCUDEMO.PKT en Packet Tracer 7.1 y se familiarizará con el emulador de MCU de PT y su aspecto de programación.
Recursos necesarios
- 1 PC con Packet Tracer 7.1 o posterior instalado
- Archivo MCUDEMO.PKT
Parte 1: Introducción
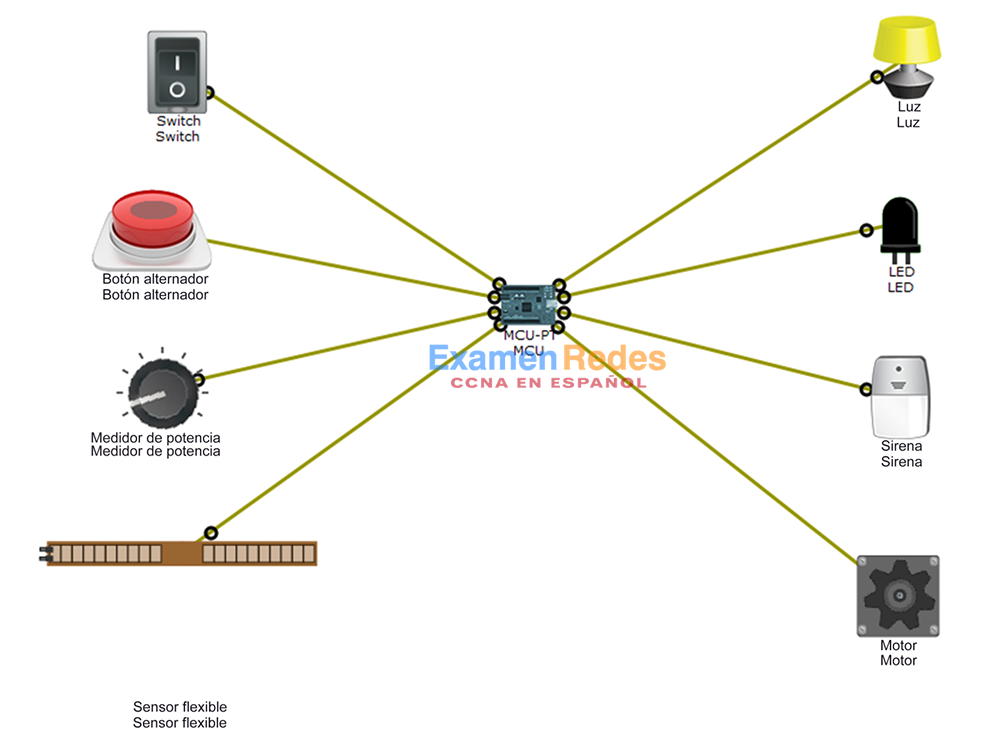
La MCU de PT es una placa con un puerto USB, seis puertos de E/S digital y cuatro puertos de E/S analógica. Los puertos de E/S digital en la MCU de PT permiten que un usuario conecte accionadores y sensores digitales. Los puertos de E/S analógicos permiten que un usuario conecte accionadores y sensores analógicos. En esta demostración, hay una sola MCU de PT conectada a cuatro sensores y cuatro accionadores. Los cuatro sensores incluyen un interruptor digital, un botón alternador digital, un medidor de potencia analógico y un sensor flexible analógico. Los cuatro accionadores incluyen una luz, un LED, una sirena y un motor analógico. La MCU de PT está programada en Python para leer continuamente los valores del sensor y escribir los accionadores regidos por la lógica condicional. La relación entre los sensores y los accionadores puede resumirse de la siguiente manera:
- El interruptor controla la luz
- El pulsador controla el LED
- El potenciómetro controla la sirena
- El sensor flexible controla el motor
Parte 2: Los sensores y la MCU de PT
a. Tómese un momento para analizar la topología. La MCU se coloca en el centro. Los dispositivos de entrada (sensores e interruptores) se colocan a la izquierda y los dispositivos de salida a la derecha.
b. Explore la MCU, los sensores, los interruptores y los dispositivos de control para abrir las ventanas de configuración. Tenga en cuenta que los diferentes dispositivos tienen distintas fichas.
En la ventana MCU, la ficha Programación contiene el código en ejecución de Python. El código de Python define el comportamiento del dispositivo.
c. ALT + clic (mantenga presionada la tecla ALT mientras hace clic en el dispositivo) para interactuar con el dispositivo.
ALT + clic en el interruptor para encender/apagar la luz.
ALT + clic en el pulsador para encender/apagar el LED.
ALT + clic (presione y arrastre el medidor de potencia para controlar el volumen de la sirena).
ALT + clic (presione y arrastre el sensor flexible para controlar la velocidad del motor).
d. Anote a qué puertos de la MCU se conectan los sensores, los interruptores y los dispositivos.
Parte 3: Programación de la MCU
Nota: el Python usado en PT es un Python de código abierto para intérprete JavaScript que no se actualiza a Python 3.0. Por esta razón puede haber leves diferencias en la sintaxis entre el código observado en PT y los de los dispositivos que utilizan Python 3.
a. Abra la MCU ubicada en el centro de la topología.
b. Seleccione la ficha Programación para acceder al código en ejecución de Python en la MCU.
c. Observe el código e intente comprenderlo. A continuación hay un resumen de las tareas que realiza:
En las líneas 1 y 2, todas las clases en las bibliotecas tiempo y gpio se importan al programa. Esto es importante para brindar acceso a las funciones de tiempo y entrada/salida de uso general (GPIO).
Se declaran e inician cuatro variantes globales en las líneas 4, 5, 6 y 7. Estas variables se utilizarán para mantener los valores del sensor.
Se crea la función readFromSensors() (líneas 9 a 18). En primer lugar, la función prepara las variables del sensor (líneas 10 a 13). La función readFromSensors() convoca a otras dos funciones, digitalRead() y analogRead(), para capturar el estado de los sensores y almacenarlo en las variables adecuadas (líneas 15 a 18). Tenga en cuenta que digitalRead() y analogRead() toman un número de pin como parámetro. Mediante la conexión de sensores específicos en los pines, el programa puede capturar el estado de los sensores específicos.
Se crea otra función en las líneas 20 a 39: writeToActuators() se usa para cambiar el estado de los accionadores en función del estado de los sensores. En las líneas 21 a 24, el programa prueba los contenidos de la variable switchValue. Debido a que switchValue almacena el estado del pin 0 (vea la línea 15), el programa puede decidir si enciende la luz; si el valor almacenado en switchValue es equivalente a ALTO (se aplica voltaje o el interruptor está ENCENDIDO), el programa enciende la luz escribiendo el valor 2 en el accionador 2. Por otro lado, si switchValue es equivalente a BAJO (no se aplica voltaje o el interruptor está APAGADO), el programa apaga la luz escribiendo 0 en el accionador 2.
Asimismo, las líneas 26 a 39 prueban y modifican otros accionadores en función de los sensores de control respectivos.
Las líneas 41 a 54 definen la función main(). Como lo indica su nombre, la función main() se ejecuta automáticamente cuando se enciende la MCU por primera vez. Las líneas 42 a 46 inician los pines; los pines 0 a 1 se configuran como ENTRADA (líneas 42 y 43) mientras que los pines 2, 3 y 4 se configuran como SALIDA. Esto es importante porque los pines de ENTRADA reciben voltaje y los pines de SALIDA emiten voltaje generado por la MCU.
Se crea un bucle while infinito en las líneas 48 a 51. Dado que la condición del bucle simplemente indica true, la MCU ejecutará las líneas 49, 50 y 51 continuamente. Este bucle while infinito fuerza la MCU:
1. Ejecuta la función readFromSensors() en la línea 49.
2. Ejecuta la función writeToActuators() en la línea 50.
3. Espere 1 segundo en la línea 51 (1000 ms = 1 segundo).
4. Reinice el bucle desde la parte superior regresando a la línea 49 y ejecutando la función readFromSensors() nuevamente.
Tenga en cuenta que, si bien los bucles infinitos no son deseados, son útiles en este programa; el bucle infinito garantiza que la MCU verifique constantemente el estado de los sensores y los interruptores (mediante la ejecución de readFromSensors() cada segundo) y tome siempre la medida adecuada para los accionadores (mediante la ejecución de writeToActuators()) en función del estado de los sensores.
d. Actualmente, la luz se controla mediante el interruptor y el LED se controla mediante el pulsador. Modifique el código para que el interruptor controle el LED y el pulsador controle la luz.
Parte 4: Reflexión
La introducción de la MCU de PT programable en Packet Tracer 7.1 permite un potente entorno de simulación de IdC. El uso de Python como lenguaje de programación además contribuye a una plataforma robusta.
a. DESAFÍO 1: transfiera el circuito 1 del kit básico de SparkFun, “Hacer parpadear el LED”, a Packet Tracer 7.1 con la MCU de PT como microcontrolador.
Sugerencia: deberá transferir el código presentado en el SIK a Python.
Además deberá modificar los pines utilizados en el SIK para adaptar el sistema numérico del pin de la MCU de PT.
b. DESAFÍO 2: con los conceptos presentados en el circuito 1 del kit básico de SparkFun, Hacer parpadear el LED, el circuito 4, LED múltiples, y el circuito 5, Pulsador, use Packet Tracer 7.1 o posterior para crear un circuito que ilumine uno de los ocho LED en secuencia, cada vez que se presiona el pulsador.
Requisitos:
Debe usar 8 LED alineados.
Cada vez que se presiona el pulsador, el LED actualmente iluminado se oscurece y el próximo se ilumina.
Solo debe haber un LED iluminado en un momento determinado.
Sugerencia: use la MCU de PT como microcontrolador.